
控制重构
编辑是控制理论中实现动态系统容错控制的一种积极方法。当严重的故障,如执行器或传感器故障,导致控制环路断裂时,必须对其进行重组,以防止在系统层面出现故障。除了环路重组,控制器参数也必须调整,以适应变化的工厂动态。控制重构是提高反馈控制下的系统可靠性的一个构件。
重构问题
编辑该工厂的名义线性模型是
{ x ˙ = A x + B u y = C x {dISPlaystyle {begin{cases}{dot {mathbf {x}}.}&==mathbf {A}ǞǞ++B…mathbf {y} &=mathbf {C}。{pos(288,255)}END{cases}}。
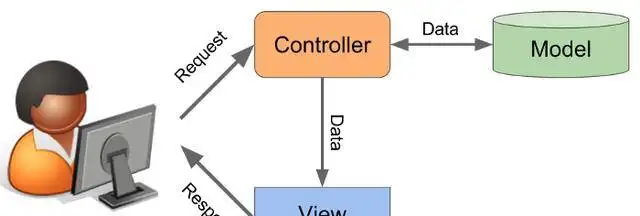
受故障影响的工厂(图中用红色箭头表示)的模型一般为
{ x ˙ f = A f x f + B f u y f = C f x f {diSPlaystyle {begin{cases}{dot {mathbf {x}}.}}_{f}&={A}_{f}_{f}mathbf {x}}_{f}mathbf {x}_{f}mathbf {u} mathbf {y}mathbf {y}_{f}&=mathbf {C}_{f}mathbf {x} _{f}mathbf {x}_{f}end{cases}}。
其中下标f {{displaystyle f}表示系统是有缺陷的。这种方法通过修改系统矩阵来模拟乘法故障。具体来说,执行器故障由新的输入矩阵B f {{displaystylemathbf {B}}代表。_{f}},传感器故障由输出矩阵C f {C} _{f}表示。_{f}}而工厂内部故障则由系统矩阵A f {A}_{f}表示。_{f}}.
上半部分显示了一个由故障检测和隔离(FDI)和重新配置组成的监督回路,它通过以下方式改变回路
从{ u , y {displaystylemathbf {u} ,mathbf {y}中选择新的输入和输出信号来改变回路。}}来达到控制目标,改变控制器的内部结构(包括动态结构和参数),调整参考输入w { wdisplaystyle mathbf {w}}。}为此,输入和输出的向量包含所有可用的信号,而不仅仅是控制器在无故障运行时使用的信号。
替代方案可以将故障建模为一个附加的外部信号f {displaystylemathbf {f}},影响状态导数和输出。}对状态导数和输出的影响如下。
{ x ˙ f = A x f + B u + E f y f = C f x f + F f {{begin{cases}{dot {mathbf {x}}}_{f}}&=C f x f + F f}}_{f}&={A}{mathbf {A}。{fnTahomafs10bord0shad01cH00FFFF}and==mathbf {A}and==mathbf {A}._{f}+{b}+{b}+{b}+{b}+{b}+{b}+{b}+{b}+{b}+{b}+{b}。mathbf {u} +mathbf {E} mathbf {E}{fnTahomafs10bord0shad01cH00FFFF}Oh!mathbf {y}_{f}&=_{c}_{f}mathbf {x}_{f}mathbf {x}.{f}+ {f}+ {f}+ {f}+ {f}+ {f}+ {f}+ {f}+ {f}+END{cases}}。
重新配置的目标
编辑重新配置的目标是保持重新配置的控制回路性能足以防止工厂关闭。以下目标是有区别的。
稳定
编辑平衡恢复
编辑输出轨迹恢复 状态轨迹恢复 瞬态时间响应恢复 重新配置的闭环的内部稳定性通常是最低要求。平衡恢复目标(也被称为弱目标)是指在给定的恒定输入后,重新配置的环路达到的稳态输出平衡。这个平衡必须等于相同输入下的名义平衡(当时间趋于无穷大时)。这个目标确保了重构后的稳态参考跟踪。输出轨迹恢复目标(也被称为强目标)更加严格。它要求对输入的动态响应在任何时候都必须等于额定响应。状态轨迹恢复目标施加了进一步的限制,它要求在任何输入下,通过重新配置将状态轨迹恢复到名义情况。
通常在实践中追求的是目标的组合,如平衡-恢复目标与稳定性。
对于特定的故障,是否能达到这些或类似的目标,这个问题由可重构性分析来解决。
重构方法
编辑故障隐藏
编辑这种范式的目的是使名义控制器保持在循环中。为此,可以在故障设备和名义控制器之间放置一个重新配置块。它与故障设备一起构成了重新配置的设备。重组块必须满足这样的要求,即重组后的工厂的行为与额定的,即无故障工厂的行为相匹配。
线性模型跟随
编辑在线性模型跟随中,试图恢复名义闭环的形式特征。{fnFangSong_GB2312bord1shad1pos(200,288)}是狀態反饋控制結構的}的一个状态反馈控制结构被使用。新的控制器K f {displaystyle mathbf {K} _{f}}被发现近似于A ¯ { {displaystyle {bar {A}} }}在意义上接近A ¯。}}在诱导矩阵规范的意义上。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/192715/