
测量平差
编辑测量平差是基于观测残差的最小二乘原理求解超定方程组的模型。 它广泛用于测量、大地测量学和摄影测量学(统称为地理信息学领域)。
配方
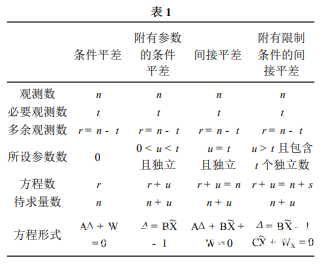
编辑最小二乘调整有三种形式:参数、条件和组合:
- 在参数调整中,可以找到一个观察方程 h(X)=Y,它根据参数 X 明确关联观察 Y(导致下面的 A 模型)。
- 在条件调整中,存在一个条件方程,即 g(Y)=0,仅涉及观测 Y(导致下面的 B 模型)——根本没有参数 X。
- 最后,在组合调整中,参数 X 和观测值 Y 都隐含在混合模型方程 f(X,Y)=0 中。
参数和条件调整分别对应于更一般的组合情况。 然而,特殊情况需要更简单的解决方案,如下所述。 通常在文献中,Y 可能表示为 L。
解决方案
编辑上面的等式只适用于估计参数 X ^ 和观察 Y ^ ,因此 f ( X ^ , Y ^ ) = 0
可以对方程进行泰勒级数展开,得到雅可比矩阵或设计矩阵:第一个,
A = ∂ f / ∂ X ;
第二个,
B = ∂ f / ∂ Y 。
线性化模型然后读取:
w ~ + A x ^ + B y ^ = 0 ,
在参数化调整中,第二个设计矩阵是一个恒等式,B=-I,misclosure向量可以解释为预拟合残差,y ~ = w ~ = h ( X ~ ) − Y ~
这是普通最小二乘的形式。 在条件调整中,第一个设计矩阵为空,A=0。对于更一般的情况,引入拉格朗日乘子来关联两个雅可比矩阵并将约束最小二乘问题转化为无约束(尽管更大)。 在任何情况下,它们的操作都会导致 X ^和 Y ^ 向量以及各自的参数和观察值 a 后验协方差矩阵。
计算
给定上面的矩阵和向量,它们的解是通过标准最小二乘法找到的。
扩展
编辑如果遇到秩不足,通常可以通过包含对参数和/或观测值施加约束的附加方程来纠正,从而导致受约束的最小二乘法。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/207152/