
点群
编辑在几何学中,点群是具有共同固定点的对称运算(欧几里得空间中的等距)的数学群。 欧几里德空间的坐标原点通常取为一个不动点,那么维度d中的每个点群都是正交群O(d)的一个子群。 点群用于描述几何图形和分子等物理对象的对称性。
每个点群都可以表示为一组正交矩阵 M,它们根据 y = Mx 将点 x 变换为点 y。 点群的每个元素要么是旋转(M = 1 的行列式),要么是反射或不正确的旋转(M = −1 的行列式)。
晶体的几何对称性由空间群描述,空间群允许平移并包含点群作为子群。 多于一维的离散点群来自无限族,但根据晶体学限制定理和比伯巴赫定理之一,每个维数只有有限数量的点群,这些点群在某个晶格或网格上对称 维数。 这些是晶体学点群。
手性和非手性点群、反射群
编辑点群可分为手性(或纯旋转)群和非手性群。手性群是特殊正交群 SO(d) 的子群:它们仅包含保向正交变换,即行列式 +1 的变换。 非手性群还包含行列式 −1 的变换。 在非手性群中,保向变换形成指数为 2 的(手性)子群。
有限 Coxeter 群或反射群是那些纯粹由一组穿过同一点的反射镜生成的点群。
点群列表
编辑一维
编辑一维点群只有两个,身份群和反射群。
二维
编辑二维点群,有时称为玫瑰花状群。
他们来自两个无限的家庭:
- n次旋转群的循环群Cn
- n次旋转和反射群的二面体群Dn
应用晶体限制定理将两个系列的 n 限制为值 1、2、3、4 和 6,从而产生 10 个组。
由 1 个或 2 个镜子定义的纯反射点组的子集,也可以由它们的 Coxeter 组和相关多边形给出。 这些包括 5 个结晶组。 反射群的对称性可以通过同构加倍,通过平分镜将两个反射镜映射到彼此,使对称阶数加倍。
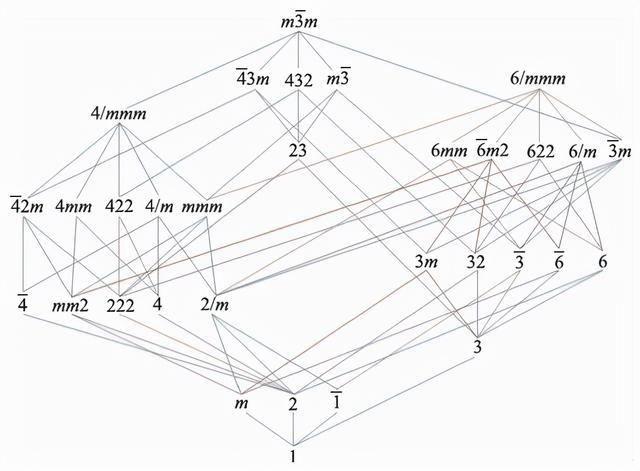
三维
编辑三维点群在研究分子对称性时被广泛使用,有时也称为分子点群。
它们有 7 个无限系列的轴群(也称为棱柱群)和 7 个额外的多面体群(也称为柏拉图群)。
将晶体学限制定理应用于这些群会产生 32 个晶体学点群。
当 Intl 条目重复时,第一个用于偶数 n,第二个用于奇数 n。
反思组
由 1 到 3 个镜面定义的反射点群,也可以由它们的 Coxeter 群和相关的多面体给出。 [3,3] 群可以加倍,写作 [[3,3]],将第一个和最后一个镜像相互映射,将对称性加倍为 48,并与 [4,3] 群同构。
四个维度
编辑四维点群(手性和非手性)列于 Conway 和 Smith,第 4 节,
以下列表给出了四维反射群(不包括那些保留子空间固定且因此是低维反射群的反射群)。 每个群被指定为一个 Coxeter 群,并且像 3D 的多面体群一样,它可以由其相关的凸正则 4-多面体命名。 相关的纯旋转群以半阶存在,可以用带’+’指数的括号 Coxeter 符号表示,例如 [3,3,3]+ 有三个 3 倍旋转点和对称阶 60. 前后对称群如 [3,3,3] 和 [3,4,3] 可以加倍。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/214879/