
像人的手一样自由移动的机械手出来了。
韩国机械材料研究所于5月22日宣布,道贤敏博士的研究团队开发了一种人类手形的机器人手,可以处理日常生活中的各种物体和工具,例如捡鸡蛋,剪鸡蛋等。
机械手由四个手指和十六个关节组成。使用十二个电动机在每个方向上移动。
研究人员将传感器放在指尖,节点和手掌上,这些传感器可以测量物体的力。
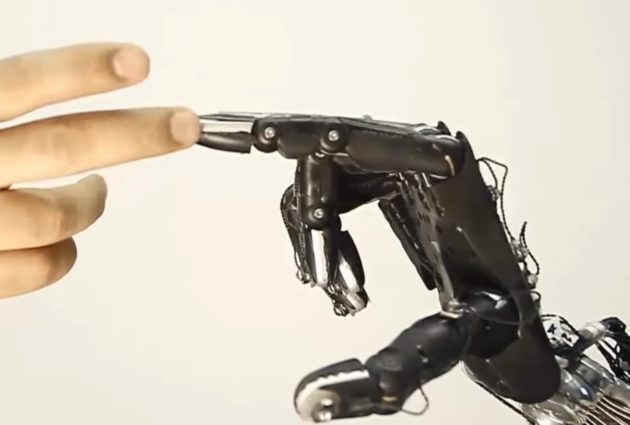

指尖上安装的直径为15毫米且重量小于5克的传感器可测量机器人手与物体接触时检测到的力的大小和方向。
手指关节和手掌具有与SNU合作开发的皮肤型触觉传感器。当机械手和物体接触时,将测量接触区域的分布和力。
该团队解释说,机器人的手与物体的形状和类型无关。可以通过改变从像鸡蛋一样易碎的卵形物体到光滑的球形苹果的力来控制它。
与现有的机械手不同,它通过安装将手指移动到手掌内的驱动单元成功地实现了模块化。
它比商用机器人手更轻巧,功能更强大。用1公斤重的机器人手可以提起重3公斤以上的物体。
研究小组说,减肥是世界上最好的。
它可用于组装非典型物体或需要复杂运动的工业现场。
高级研究员杜贤敏说:“我们通过模仿人的手的细微动作来开发了机器人手。”
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/104444/
