
简介
编辑在导航中,方位角或方位角是一个物体的方向与北方或另一个物体之间的水平角。 角度值可以用各种角度单位指定,例如度、密耳或梯度。进一步来说:
- 绝 对方位角是指磁北(磁方位角)或真北(真方位角)与物体之间的角度。 例如,正东的物体将具有 90 度的绝 对方位角。 因此,它与方位角相同。
- 相对方位是指飞行器前进方向(航向)与另一物体位置之间的角度。 例如,相对方位角为 0 度的物体将紧靠在前方; 相对方位 180 度的物体会落后。 轴承可以用密耳、点或度来测量。 因此,它与方位角差(模 +/- 360 度)相同。
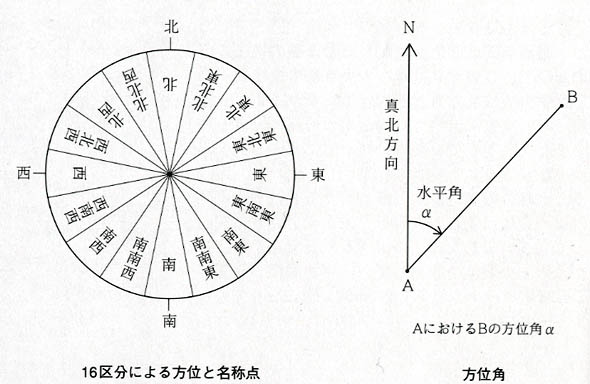
方位用2个字符和1个数字表示:第 一个字符是N或S; 接下来是角度数值; 第三,表示垂直方向的字符,E或W。方位角值将始终小于90度。 例如,如果 B 点正好位于 A 点的东南方向,则从 A 点到 B 点的方位角为 S 45° E。例如,如果点 A 和点 B 之间的方位角为 S 45° E,则点之间的方位角 A点和B点是135°。
类型
编辑绝 对
编辑在航海导航中,绝 对方位是北方与从船只观察到的物体之间的顺时针角度。
如果用作参考的北方是真正的地理北方,则方位角是真正的方位角,而如果使用的参考是磁北,则方位角是磁方位角。绝 对方位角是用方位罗盘测量的。
固定地标和其他助航设备的绝 对方位测量对导航员很有用,因为可以在航海图上使用此信息以及简单的几何技术来帮助确定船只的位置。
网格方位角(也称为网格方位角)是相对于固定的网格北水平参考平面测量的,即以地图投影的网格线向北的方向为参考点。
在车辆或航海中,罗盘方位是相对于导航员的车辆或船只(如果在船上)的磁罗盘进行测量的。它应该非常靠近磁轴承。磁方位和罗盘方位之间的区别在于黑色金属和各种车辆或船载源(钢制车体/框架或船体、点火系统等)产生的局部磁场对罗盘造成的偏差。
相对
编辑在航海中,物体的相对方位是从船只航向到从船只上的观察站到物体绘制的直线的顺时针角度。
相对方位是用圆盘或其他光学和电子导航辅助设备(如潜望镜、声纳系统和雷达系统)测量的。相对方位角作为将相对方向数据转换为真实方位角(N-S-E-W,相对于地球的真实地理)的基线数据。 相比之下,罗盘方位角在地球上的不同位置具有不同的误差系数,并且不如补偿方位角或真实方位角可靠。
固定地标和其他助航设备的相对方位测量对领航员很有用,因为该信息可与简单的几何技术一起用在海图上,以帮助确定船只的位置和其速度、航向等。
测量运动中的其他船只和物体的相对方位有助于导航员避免碰撞危险。 例如:
- 当灯塔的相对方位角为 45° 和 90° 时,船上的领航员会观察灯塔。 他现在知道从船到灯塔的距离等于两次观察之间船只行驶的距离。
- 一艘船的领航员观察到另一艘船的相对方位小于 180° 并且正在减小(也就是说,它现在比以前更接近正前方)。 他现在知道他将在另一条船的尾部经过。 如果方位保持不变,两艘船就会发生碰撞。
例子
编辑领航方位可以放在另一艘船上以帮助领航。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/207134/