逆深度参数化
编辑在计算机视觉中,逆深度参数化是一种参数化,用于从多个图像进行三维重建的方法,如同步定位和绘图(SLAM)。给定一个点在三维空间中由单眼针孔相机从多个视角观察到的点,该点位置的反深度参数化是一个6D矢量,编码相机的光学中心的光学中心,以及该点的位置沿着穿过反深度参数化通常可以提高数值稳定性,并允许表示具有零视差的点。此外,当用反深度表示时,与观察点的位置有关的误差可以用高斯分布来模拟。这是应用卡尔曼滤波等假设测量误差分布为正态的方法所需要的一个重要属性。其主要缺点是内存消耗较大,因为点的表示维度增加了一倍。

逆深度参数化的定义
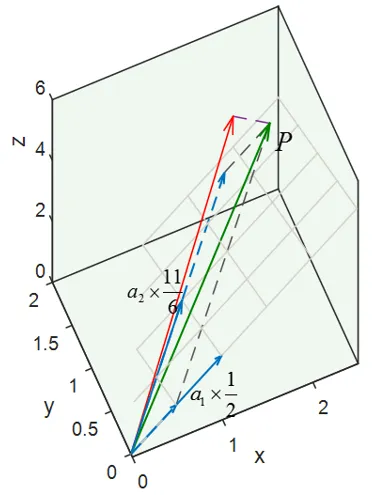
编辑给定的三维点{displaystylemathbf{p}=(x,y,z)},其世界坐标在参考框架内。其世界坐标在一个参考框架内{displaystylemathbf{y}=(x_{0},y_{0},z_{0},theta,phi,rho)},其中前五个分量编码了xxx次观测点的相机姿态。其中,前五个分量编码了摄像机在xxx次观察点时的姿态。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/174543/