目录
自适应控制
编辑自适应控制是控制器使用的控制方法,它必须适应参数变化或初始不确定的受控系统。例如,飞机在飞行过程中,由于燃料消耗,其质量会慢慢下降;需要一种能够适应这种不断变化的条件的控制法则。
自适应控制不同于鲁棒控制,因为它不需要关于这些不确定或时变参数边界的先验信息;鲁棒控制保证如果变化在给定范围内,则无需更改控制律,而自适应控制则关注控制律自身的变化。
参数估计
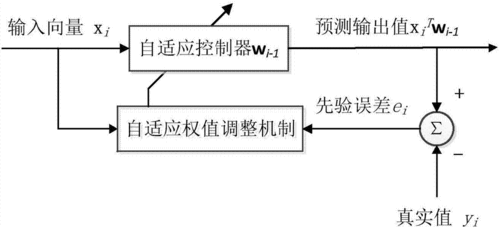
编辑自适应控制的基础是参数估计,它是系统辨识的一个分支。常用的估计方法包括递归最小二乘法和梯度下降法。这两种方法都提供了用于实时修改估计值的更新法则(即,随着系统运行)。
李雅普诺夫 (Lyapunov) 稳定性用于推导这些更新法则并显示收敛标准(通常是持续激励;这种条件的松弛在并发学习自适应控制中进行了研究)。投影和归一化通常用于提高估计算法的鲁棒性。
自适应控制技术的分类
编辑一般来说,应该区分:
- 前馈自适应控制
- 反馈自适应控制
以及之间
- 直接法
- 间接方法
- 混合方法
直接方法是其中估计参数是直接在自适应控制器中使用的参数的方法。相反,间接方法是使用估计参数来计算所需控制器参数的方法。混合方法依赖于参数估计和控制律的直接修改。
反馈自适应控制有几大类(分类可能会有所不同):
- 双自适应控制器——基于双控制理论
- 最佳双控制器——难以设计
- 次优双控制器
- 非对偶自适应控制器
- 自适应极点放置
- 追求极值的控制者
- 迭代学习控制
- 增益调度
- 模型参考自适应控制器 (MRAC) – 包含定义所需闭环性能的参考模型
- 梯度优化 MRAC——当性能与参考不同时,使用本地规则调整参数。 例如:MIT 规则。
- 稳定性优化的 MRAC
- 模型识别自适应控制器 (MIAC) – 在系统运行时执行系统识别
- 谨慎的自适应控制器——使用当前 SI 修改控制律,允许 SI 不确定性
- 确定性等效自适应控制器——将当前 SI 视为真实系统,假设没有不确定性
- 非参数自适应控制器
- 参数自适应控制器
- 显式参数自适应控制器
- 隐式参数自适应控制器
- 多个模型 – 使用大量模型,这些模型分布在不确定区域,并基于工厂和模型的响应。每时每刻都会选择一个模型,根据某种指标,该模型最接近工厂。
自适应控制中的一些专题也可以引入:
- 基于离散时间过程辨识的自适应控制
- 基于模型参考控制技术的自适应控制
- 基于连续时间过程模型的自适应控制
- 多变量过程的自适应控制
- 非线性过程的自适应控制
- 并行学习自适应控制,放宽一类系统参数收敛的持续激励条件
近年来,自适应控制与模糊和神经网络等智能技术相结合,产生了模糊自适应控制等新概念。

应用
编辑在设计自适应控制系统时,需要特别考虑收敛性和鲁棒性问题。李雅普诺夫 (Lyapunov) 稳定性通常用于推导控制适应律并显示 。
- 在一个操作点的实施阶段对随后固定的线性控制器进行自整定;
- 在实施阶段针对整个操作点范围对随后固定的鲁棒控制器进行自调整;
- 如果过程行为因老化、漂移、磨损等而发生变化,则根据要求对固定控制器进行自整定;
- 用于非线性或时变过程的线性控制器的自适应控制;
- 自适应控制或非线性过程的非线性控制器的自调整控制;
- 自适应控制或self-t
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/193442/