
畸变
编辑畸变,通常也被错误地称为(光学)畸变,是光学系统的几何像差,会导致镜头方程中成像比例的局部变化。 随着像点和光轴之间的距离增加,比例的变化基于放大率的变化。 因此,畸变围绕一点旋转对称,即畸变的对称点,也称为畸变中心。 畸变的原因在于孔径或极限透镜直径,它们使具有球面像差的光学系统主平面前后的图像光束变窄。 这意味着可用于构建光束路径的部分光束被消隐。 与没有孔径的光学系统相比,这改变了主光线的方向并导致畸变。
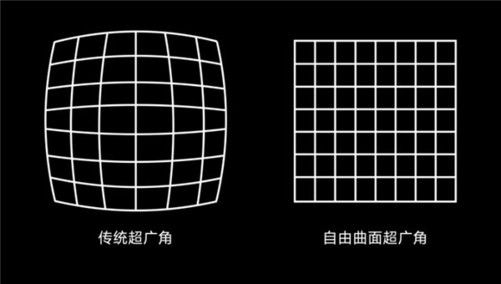
随着放大率向像场的边缘增加,正方形呈枕形。 反之则称为桶形畸变。 高阶的畸变也可以出现,不同阶的叠加可以得到直线的波浪图像(“波浪畸变”)。
对于日常使用的光学设备,畸变通常不是明显的缺点,因此有时会被接受。 近视眼镜的边缘有一个强烈的桶形畸变。
在具有多个镜头的设备中,例如望远镜,可以通过光学校正保持较小的畸变:
这些无畸变的光学元件称为正视透镜系统。 然而,对于视觉使用的光学器件,为了消除令人不安的地球效应,有意实施枕形 畸变 并不少见。
如果摄影图像用于精确测量,则可以使用适当校正的镜头系统,例如远心镜头。 另外,剩余的畸变可以在评价图像时通过测量确定并通过计算补偿。
镜头的畸变不应与透视失真混淆。 透视失真来自于以某个角度观看场景,在此过程中丢失纵横比(角度)。 因此,从任何中心角度倾斜地观察一个平面正方形将被扭曲成一个一般的四边形。
补偿
编辑已经专门为摄影测量中的图像测量开发了方法,以建模和计算镜头的畸变(相机校准)。
通过反转这些模型,可以补偿图像的实际畸变并计算无失真图像。 如果图像中心的再现比例保持不变,则桶形畸变校正后的图像变大,枕形畸变校正后的图像变小。 一些软件在桶形失真校正期间保留原始纵横比并在边缘裁剪有用的图像信息,即使更大、未失真的矩形图像也是可能的。
等值线上的数字表示以微米为单位的补偿量。 箭头的长度对应于变化长度的十五倍。 坐标 u 和 v是相对于图像中心的图像坐标。
数码相机系统,例如微型四分之三系统,可以将个别镜头属性(例如畸变的特性)转移到相机机身,从而能够在相机或后续图像处理中对这种几何像差进行自动数字补偿。
数学程序
对于完美的透镜,半径保持不变,适用以下公式: r s r c = r d s t 。
应用实例
编辑在摄影中,畸变经常被刻意用作一种艺术工具。 畸变效果是故意的,尤其是鱼眼镜头。
在电影和视频领域,宽银幕格式的变形图像是由特殊的相机和镜头系统带来的。最初,变形工艺用于在电影院中实现宽银幕格式,而无需改变标准胶片格式中通常的 35 毫米胶片材料。 宽屏图像在拍摄过程中通过有针对性的失真进行了压缩 – 并在电影院播放过程中通过相反的镜头排列再次均衡。 这开创了宽银幕电影时代——无需完全更换现有的摄像机和投影技术。
但不仅长宽比受到变形技术的影响:创造了一种被认为是迄今为止最先进技术的电影风格。 许多电影效果都基于变形镜头并创造出“电影效果”:减少景深以更好地分离前景和背景、椭圆形照明效果(散景)、扭曲的宽屏显示、彩虹色的椭圆形光反射、条纹用作艺术工具的眩光、光晕和故意失真。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/363594/