相位裕度
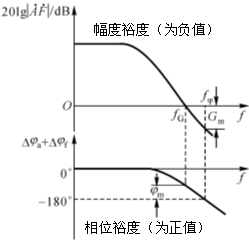
编辑在电子放大器中,相位裕度(PM)是一个放大器的输出信号(相对于它的输入)在零分贝增益下φ(<0)和-180°之间的差值--也就是统一增益,或者说输出信号与输入有相同的振幅。
P M = φ - ( - 180 ∘ ) {\displaystylemathrm {PM} ==varphi -(-180{circ })。
例如,如果放大器的开环增益在相位滞后为-135°的频率上越过0dB,那么这个反馈系统的相位差就是-135° -(-180°) = 45°。更多细节请参见Bode plot#Gain margin and phase margin。
理论
编辑通常情况下,开环相位滞后(相对于输入,φ<0)随频率变化,逐渐增加到超过180°,在此频率下,输出信号变得反转,或相对于输入反相。PM将是正的,但在频率低于反相的频率(PM=0)时,PM会下降,而在更高的频率下,PM是负的(PM<0)。在有负反馈的情况下,在环路增益超过统一的频率上,PM为零或为负,保证了不稳定。因此,正PM是一个安全系数,确保电路的正常(非振荡)运行。这适用于放大器电路,也适用于更普遍的有源滤波器,在各种负载条件下(如无功负载)。在其最简单的形式中,涉及到具有无功反馈的理想负反馈电压放大器,相位差是在放大器的开环电压增益等于期望的闭环直流电压增益的频率上测量的。
更一般地说,PM被定义为放大器及其反馈网络的组合(环路,通常在放大器输入端打开),在环路增益为一的频率下测量,在闭环之前,通过将开环的输出与输入源绑在一起,以减去它的方式。
在上述环路增益定义中,假定放大器的输入为零负载。为了使其适用于非零负载输入,反馈网络的输出需要加载一个等效负载,以确定环路增益的频率响应。
我们还假定,增益与频率的关系图以负斜率穿过统一增益,而且只穿过一次。这种考虑只对无功和有功反馈网络有意义,有源滤波器也是如此。
相位裕度及其重要的配套概念--增益裕度,是衡量闭环动态控制系统的稳定性。相位裕度表示相对稳定性,即在对输入变化(如阶跃函数)的阻尼响应中的振荡趋势。增益裕度表示xxx稳定性,以及在任何干扰下,系统将无限制地振荡的程度。
与输入信号相比,所有放大器的输出信号都有一个时间延迟。这种延迟导致放大器的输入和输出信号之间存在相位差。如果放大器有足够多的级数,在某些频率下,输出信号将落后于输入信号一个周期的频率。在这种情况下,放大器的输出信号将与它的输入信号同相,尽管落后于它360°,即输出将有一个-360°的相位角。这种滞后在使用反馈的放大器中具有重要意义。原因是:如果反馈输出信号在其开环电压增益等于其闭环电压增益的频率上与输入信号同相,且开环电压增益为1或更大,则放大器会发生振荡。振荡会发生,因为此时回馈输出信号会在该频率上加强输入信号。在传统的运算放大器中,临界输出相位角是-180°,因为输出通过反相输入反馈到输入端,这又增加了一个-180°。

实践
编辑在实践中,反馈放大器的设计必须有xxx超过0°的相位差,即使相位差为1°的放大器在理论上是稳定的。原因是许多实际因素会使相位差降低到理论上的最小值以下。一个xxx的例子是当放大器的输出连接到一个电容性负载时。因此,运算放大器通常被补偿以达到45°左右的最小相位差。这意味着,在开环和闭环增益相遇的频率上,相位角为-135°。计算方法是:-135°-(-180°)=45°。见Warwickor Stout对补偿技术和结果的详细分析,以确保足够的相位差。另见《极点分割》一文。通常情况下,放大器被设计为实现60度的典型相位余量。如果典型的相位余量是60度左右,那么最小的相位余量通常会大于45度。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/192991/