
- 1 视觉伺服
视觉伺服
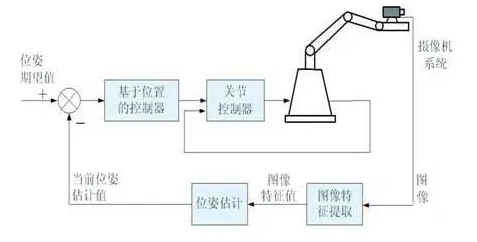
编辑视觉伺服,也被称为基于视觉的机器人控制,简称VS,是一种利用从视觉传感器中提取的反馈信息(视觉反馈)来控制机器人运动的技术。视觉伺服的分类法机器人末端执行器(手)和摄像机有两种基本配置。目视在手,或端点开环控制,摄像头连接在移动的手上,观察目标的相对位置。目视到手,或端点闭环控制,摄像头固定在世界中,观察目标和手的运动。视觉伺服控制技术大致分为以下类型。该控制法是基于图像平面上当前特征和所需特征之间的误差,不涉及对目标姿势的任何估计。这些特征可以是视觉特征的坐标、线条或区域的时刻。IBVS对运动非常大的旋转有困难,这已被称为相机退缩。PBVS是一种基于模型的技术。这是因为感兴趣的物体的姿态是相对于摄像机估计的,然后向机器人控制器发出指令,后者反过来控制机器人。在这种情况下,图像特征也被提取出来,但另外被用来估计三维信息,因此它是三维伺服。混合方法使用二维和三维伺服的某种组合。已经有一些不同的混合伺服的方法2-1/2-D伺服系统基于运动分区的分区DOF调查以下对先前工作的描述分为3部分现有视觉伺服方法的调查。使用的各种特征及其对视觉伺服的影响。视觉伺服方案的误差和稳定性分析。现有视觉伺服方法的调查视觉伺服系统,也叫伺服系统,自20世纪80年代初就已经出现了,尽管视觉伺服这个词本身是在1987年才被提出来的。视觉伺服本质上是一种机器人控制方法,所使用的传感器是照相机(视觉传感器)。伺服主要包括两种技术,一种是利用图像信息直接控制机器人的自由度(DOF),因此被称为基于图像的视觉伺服(IBVS)。而另一种是对从摄像机中提取的信息进行几何解释,如估计目标的姿势和摄像机的参数(假设已知目标的一些基本模型)。其他的伺服分类是根据伺服系统的每个部件的变化而存在的,例如,摄像机的位置,有手眼配置和手眼配置两种。根据控制回路,有端点开环和端点闭环两种类型。根据控制是否直接应用于关节(或DOF)或作为机器人控制器的位置指令,这两种类型是直接伺服和动态观察和移动。作为最早的工作之一,作者提出了一个应用于基于图像的伺服的分层视觉伺服方案。该技术依赖于这样一个假设,即可以从感兴趣的物体(如边缘、角落和中心点)中提取一组良好的特征,并与场景和机器人的全局模型一起作为部分模型使用。
该控制策略被应用于一个二和三DOF机器人手臂的模拟。Feddema等人提出了生成与特征速度有关的任务轨迹的想法。作者假设物体是预先知道的(如CAD模型),所有的特征都可以从物体中提取。ESPiau等人的工作讨论了视觉伺服的一些基本问题。讨论集中在交互矩阵、摄像机、视觉特征(点、线等)的建模上。在一个自适应伺服系统中,提出了一个边看边移动的伺服结构。该方法使用光流和固态硬盘来提供置信度量,并使用卡尔曼滤波的随机控制器来控制方案。该系统假设(在例子中)相机的平面和特征的平面是平行的,讨论了使用雅各布关系s˙=Jv˙的速度控制方法。建立了一个目标速度模型,并将其作为控制回路的前馈输入。此外,还提到了研究运动学的重要性。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/174668/