自抗扰控制
编辑自抗扰控制(或 ADRC)继承自比例-积分-微分 (PID)。 它包含非线性反馈的力量并将其充分利用。 它是一种基于系统模型扩展的鲁棒控制方法,带有一个附加的和虚构的状态变量,表示用户不包括在工厂的数学描述中的所有内容。 这种虚拟状态(内部和外部干扰的总和,通常表示为总干扰)由状态观察器在线估计并用于控制信号,以便将系统与作用于设备的实际扰动解耦。 这种干扰抑制功能允许用户使用更简单的模型来处理所考虑的系统,因为实时补偿了建模不确定性的负面影响。 因此,操作员不需要对系统进行精确的分析描述,因为可以将动力学的未知部分假设为工厂的内部扰动。 这种方法的稳健性和自适应能力使其成为在无法获得系统的全部知识的情况下的有趣解决方案。
组件
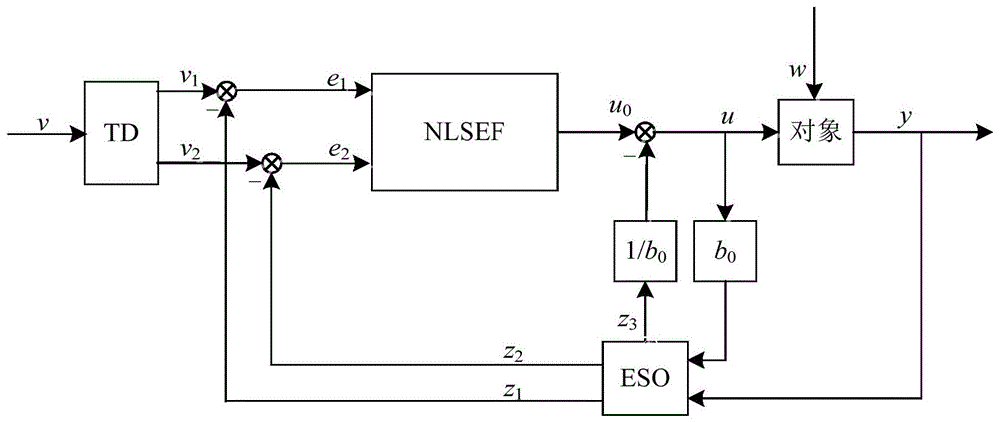
编辑跟踪差异化因素
跟踪微分器解决了 Rapidity 和 Overstrike 之间的权衡。 此外,它提高了控制器的抗噪声能力。 ADRC 的收敛性由郭和他的学生证明。
扩展状态观察者
经典观察者只关注系统状态。 ESO 观察系统状态和外部干扰。 它还可以估计未知模型的扰动。 因此,ADRC 不依赖于数学模型。

ESO 的一个子族是非线性 ESO (NESO),它利用输出估计误差的非线性不连续函数。 NESO 与滑模观测器的相似之处在于,两个观测器都使用输出估计误差的非线性函数(而不是线性、高增益和扩展观测器中的线性函数),而滑模观测器在原点处具有不连续性 , NESO 的不连续性位于指定的错误阈值处。
非线性PID
PID控制的成功是误差反馈。 ADRC采用的是非线性状态误差反馈,故韩称其为Nonlinear PID。 在线性化系统中,人们也可以使用加权状态误差作为反馈。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/193429/