
比例控制
编辑比例控制,在工程和过程控制中,是一种线性反馈控制系统,其中对受控变量施加修正,修正的大小与期望值(setpoint,SP)和目标值之间的差值成正比 测量值(过程变量,PV)。 两个经典的机械示例是抽水马桶浮动比例阀和飞球调速器。
比例控制概念比双金属家用恒温器等开关控制系统更复杂,但比汽车巡航控制系统中使用的比例-积分-微分 (PID) 控制系统更简单。 开关控制适用于整个系统具有相对较长响应时间的情况,但如果被控制的系统具有快速响应时间,则可能会导致不稳定。 示例控制通过将输出调制到控制设备(例如控制阀)以避免不稳定的水平来克服这一点,但通过应用最佳数量的比例增益来尽可能快地应用校正。
比例控制的一个缺点是它不能消除补偿过程中的残余 SP − PV 误差,例如 温度控制,因为它需要一个误差来产生比例输出。 为了克服这个问题,设计了 PI 控制器,它使用比例项 (P) 来消除粗差,并使用积分项 (I) 通过对随时间的误差进行积分来消除残余偏移误差,从而为控制器生成 I 分量 输出。
理论
编辑在比例控制算法中,控制器输出与误差信号成正比,误差信号是设定值与过程变量之间的差值。 换句话说,比例控制器的输出是误差信号与比例增益的乘积。
约束:在真实工厂中,执行器具有物理限制,可以表示为对 P o u t {dISPlaystyle P_{mathrm {out} }} 的约束。 例如,P o u t {displaystyle P_{mathrm {out} }} 可能在 −1 和 +1 之间,如果它们是最大输出限制。
限定条件:最好将 K p {displaystyle K_{p}} 表示为无量纲数。 为此,我们可以将 e ( t ) {displaystyle e(t)} 表示为与仪器量程的比率。 此跨度与误差的单位相同(例如摄氏度),因此比率没有单位。
控制框图的开发
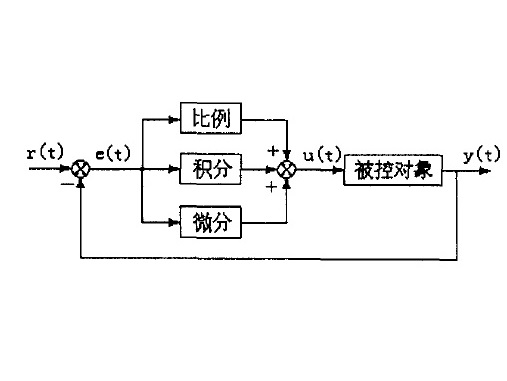
编辑比例控制规定 g c = k c {displaystyle {mathit {g_{c}=k_{c}}}} 。 从显示的框图中,假设设定点 r 是进入储罐的流量,e 是误差,即设定点和测量过程输出之间的差异。 g p , {displaystyle {mathit {g_{p}}},} 是过程传递函数; 块的输入是流量,输出是罐液位。
作为设定值 r 函数的输出被称为闭环传递函数。 g c l = g p g c 1 + g p g c , {displaystyle {mathit {g_{cl}}}={frac {mathit {g_{p}g_{c}}}{1+g_{p}g_ {c}}},} 如果 g c l , {displaystyle {mathit {g_{cl}}},} 的极点是稳定的,则闭环系统是稳定的。
一阶过程
编辑向系统引入一个阶跃变化给出输出响应 y ( s ) = g C L × Δ R s {displaystyle y(s)=g_{CL}times {frac {Delta R}{ }}} 。
使用终值定理,
lim t → ∞ y ( t ) = lim s ↘ 0 ( s × k C L
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/203860/