二维自适应滤波器
编辑二维(2D)自适应滤波器与一维自适应滤波器非常相似,它是一个线性系统,其参数在整个过程中根据一些优化方法被自适应地更新。一维和二维自适应滤波器之间的主要区别在于,前者通常将与时间有关的信号作为输入,这意味着因果关系的约束,而后者处理的是二维信号,如空间领域的X-Y坐标,通常是非因果关系。此外,就像一维滤波器一样,大多数二维自适应滤波器都是数字滤波器,因为算法的复杂性和迭代性。
二维自适应滤波器的动机
编辑二维自适应滤波器的主题在电气工程和信号处理中非常重要,因为这些滤波器有能力考虑到二维信号的非平稳统计特性。自适应滤波器在诸如消除噪声、信号预测、均衡和回波消除等领域都有应用。二维自适应滤波器的应用实例包括图像去噪、运动跟踪、OFDM通道估计、磁记录均衡等。
应用实例
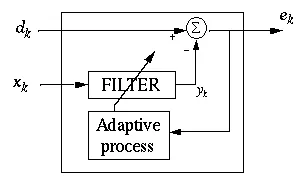
编辑二维自适应滤波器可用于识别系统。未知系统的系统函数由以下公式给出{displaystyley(n_{1},n_{2})},如果未知系统和已知的二维自适应滤波器有相同的输入,并且所产生的输出相似,则最小。,如果未知系统和已知的二维自适应滤波器有相同的输入,并且所产生的输出相似,则最小化。那么,可以证明被称为未知系统的系统识别模型。
问题说明
编辑在数字信号处理中,任何线性移位不变系统都可以用信号与滤波器的脉冲响应的卷积来表示,表达式如下。{displaystyled(n_{1},n_{2})},自适应系统可以通过根据某种成本函数不断调整权重值来获得。,自适应系统可以通过根据一些成本函数不断调整权重值而得到

二维自适应滤波器的方法
编辑二维最小均方FIR自适应滤波器最小均方(LMS)自适应滤波器使用最常见的误差测量方法,即均方误差。二维LMS自适应滤波器是由一维LMS自适应滤波器的主要方法衍生出来的,它通过调整滤波器的系数使输出均方值最小。滤波器有主二维输入信号d和参考输入信号x。主输入信号d由理想信号和噪声成分组成。滤波器是一个N乘N的因果FIR滤波器,脉冲响应为下一次迭代时的权重矩阵等于现在的权重矩阵加上与均方误差的负梯度成正比的变化。对于二维LMS自适应滤波器,滤波器系数的更新方式如下。{displaystylemu}是控制标度乘数。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/167826/