
模型预测控制
编辑模型预测控制 (MPC) 是一种先进的过程控制方法,用于在满足一组约束的同时控制过程。 自 1980 年代以来,它一直在化工厂和炼油厂的过程工业中使用。 近年来,它还被用于电力系统平衡模型和电力电子领域。 模型预测控制者依赖过程的动态模型,最常见的是通过系统识别获得的线性经验模型。 MPC 的主要优点是它允许优化当前时隙,同时考虑到未来的时隙。 这是通过优化有限时间范围来实现的,但只实现当前时隙,然后再次优化,反复进行,因此与线性二次调节器 (LQR) 不同。 MPC 还具有预测未来事件的能力,并可以相应地采取控制措施。 PID 控制器不具备这种预测能力。 MPC 几乎普遍实现为数字控制,尽管有研究通过专门设计的模拟电路实现更快的响应时间。
广义预测控制 (GPC) 和动态矩阵控制 (DMC) 是 MPC 的经典示例。
概览
编辑MPC 中使用的模型通常旨在表示复杂和简单的动态系统的行为。 通常不需要 MPC 控制算法的额外复杂性来提供对简单系统的充分控制,这些系统通常由通用 PID 控制器控制得很好。 PID 控制器难以处理的常见动态特性包括大时间延迟和高阶动态特性。
MPC 模型预测建模系统因变量的变化,这些变化将由自变量的变化引起。 在化学过程中,可由控制器调节的独立变量通常是调节 PID 控制器的设定值(压力、流量、温度等)或最终控制元件(阀门、阻尼器等)。 控制器无法调整的自变量用作扰动。 这些过程中的因变量是代表控制目标或过程约束的其他测量值。
MPC 使用当前工厂测量值、过程的当前动态状态、MPC 模型以及过程变量目标和限制来计算因变量的未来变化。 计算这些变化是为了使因变量接近目标,同时遵守对自变量和因变量的约束。 MPC 通常只发送每个要实施的独立变量的第一个变化,并在需要下一个变化时重复计算。
虽然许多实际过程不是线性的,但通常可以将它们视为在较小的操作范围内近似线性。 线性 MPC 方法用于大多数应用程序,MPC 的反馈机制补偿由于模型和过程之间的结构不匹配导致的预测误差。 在仅由线性模型组成的模型预测控制器中,线性代数的叠加原理可以将多个自变量变化的影响相加,从而预测因变量的响应。 这将控制问题简化为一系列快速且稳健的直接矩阵代数计算。
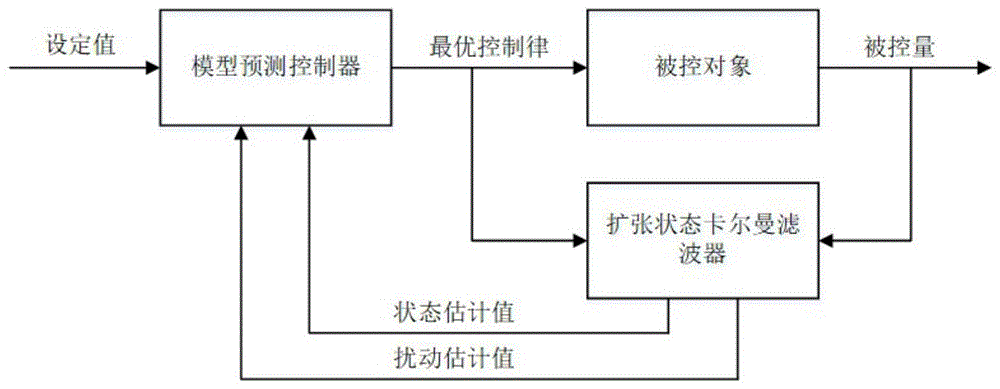
当线性模型不足以准确表示实际过程非线性时,可以使用多种方法。 在某些情况下,可以在线性 MPC 模型之前和/或之后转换过程变量以减少非线性。 该过程可以通过非线性 MPC 进行控制,它直接在控制应用程序中使用非线性模型。 非线性模型可以是经验数据拟合的形式(例如人工神经网络)或基于基本质量和能量平衡的高保真动力学模型。 非线性模型可以被线性化以导出卡尔曼滤波器或指定线性 MPC 的模型。
El-Gherwi、Budman 和 El Kamel 的一项算法研究表明,使用双模式方法可以显着减少在线计算,同时保持与未更改实施相比的性能。 所提出的算法基于控制器之间的信息交换并行解决 N 个凸优化问题。
MPC背后的理论
MPC 基于对象模型的迭代、有限范围优化。 在时间 t {dISPlaystyle t} 对当前工厂状态进行采样,并为未来相对较短的时间范围计算成本最小化控制策略(通过数值最小化算法):[ t , t + T ] { 显示样式 [t,t+T]} 。 具体来说,在线或即时计算用于探索从当前状态发出的状态轨迹,并找到(通过欧拉-拉格朗日方程的解)成本最小化控制策略。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/193534/