服务机器人
编辑服务机器人通常通过执行肮脏、沉闷、遥远、危险或重复的工作(包括家务)来协助人类。它们通常是自主的和/或由内置控制系统操作,带有手动超驰选项。术语“服务机器人”没有严格的技术定义。在国际标准化组织定义了“服务机器人”的机器人“是用于执行人体或设备不包括工业自动化应用有用的任务”。

根据ISO 8373,机器人需要“一定程度的自主权”,即“能够在没有人工干预的情况下基于当前状态和感知执行预期任务的能力”。对于服务机器人,这包括部分自主权(包括人机交互)到完全自主权(无需人为干预)。因此,服务机器人的国际机器人联合会(IFR)统计信息包括基于一定程度的人机交互或什至完全远程操作的系统以及完全自治的系统。
维修机器人根据个人或专业用途分类。它们具有许多形式和结构以及应用领域。
服务机器人的类型
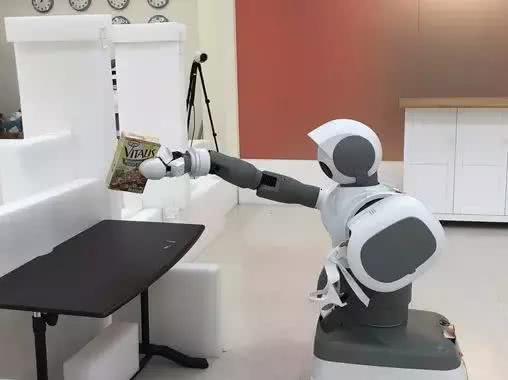
编辑机器人在协助人类做家务方面的可能应用广泛。目前,这些机器人属于几个主要类别。
工业服务机器人
工业服务机器人可用于执行简单的任务,例如检查焊接,以及执行更复杂的恶劣环境任务,例如帮助拆除核电站。国际机器人联合会已将工业机器人定义为“可在三个或三个以上轴上编程的自动控制,可重新编程,多用途机械手,该机械手可以固定在位,也可以移动以用于工业自动化应用”。
前线服务机器人
服务机器人是基于系统的自主和自适应接口,可与组织的客户进行交互,交流并向其客户交付服务。
科学服务机器人
机器人系统执行许多功能,例如在研究中执行的重复性任务。这些范围从基因采样器和测序仪完成的多次重复任务,到几乎可以取代科学家在设计和运行实验,分析数据甚至形成假设的系统。
自主的科学机器人执行从深海到太空,人类会发现困难或不可能的任务。在伍兹霍尔 哨兵可以下降到4500米,并允许更高的有效载荷,因为它并不需要支援舰或氧和要求等设施人工驾驶的船只。[6]太空中的机器人包括火星探测器,可以在火星大气层的恶劣环境中进行采样和摄影。
活动机器人
在服务机器人领域中开始使用事件机器人来与客户和活动参与者互动。机器人提供了很好的互动来源。“ Eva”摄影机器人是一个很好的例子,说明如何使用机器人进行活动来吸引与会者。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/118610/