
逆运动学
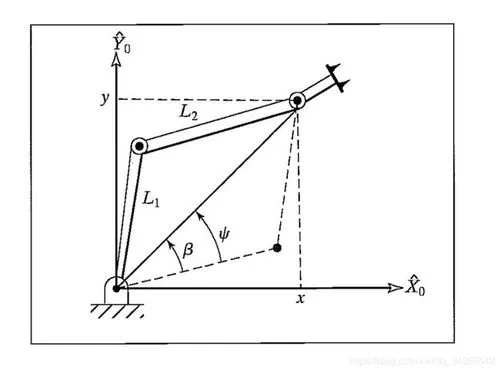
编辑在计算机动画和机器人学中,逆向运动学是计算将运动链末端(例如机器人操纵器或动画角色的骨架)放置在相对于给定位置和方向所需的可变关节参数的数学过程 链的开始。 给定关节参数,链末端的位置和方向,例如 角色或机器人的手,通常可以使用三角公式的多次应用直接计算,这一过程称为正向运动学。 然而,反向操作通常更具挑战性。
逆运动学还用于从一些其他数据中恢复世界中物体的运动,例如这些运动的电影,或者由本身进行这些运动的相机所见的世界电影。 例如,当动画角色要复制人类演员拍摄的动作时,就会出现这种情况。
机器人学
编辑在机器人技术中,逆向运动学利用运动学方程来确定关节参数,这些参数为机器人的每个末端执行器提供所需的配置(位置和旋转)。 确定机器人的运动以使其末端执行器从初始配置移动到所需配置称为运动规划。 逆运动学将运动计划转换为机器人的关节执行器轨迹。 类似的公式确定动画角色的骨骼位置,动画角色在电影中以特定方式移动,或者交通工具(例如包含正在拍摄电影场景的相机的汽车或船)的位置。 一旦知道了车辆的运动,就可以使用它们来确定计算机生成的建筑物等景观中物体图像的不断变化的视点,这样这些物体的视角就会发生变化,而它们本身似乎并没有像 车载摄像头从他们身边经过。
运动链的运动,无论是机器人还是动画角色,都是通过链的运动学方程建模的。 这些方程根据其关节参数定义链的配置。 正向运动学使用关节参数来计算链条的配置,逆向运动学反转此计算以确定实现所需配置的关节参数。
运动学分析
编辑运动学分析是大多数工业机器人设计的首要步骤之一。 运动学分析允许设计人员获得有关机械系统中每个组件位置的信息。 此信息对于后续的动态分析以及控制路径是必需的。
逆运动学是刚体约束系统或运动链的运动学分析的一个例子。 机器人的运动学方程可用于定义复杂铰接系统的回路方程。 这些循环方程是对系统配置参数的非线性约束。 这些方程中的独立参数称为系统的自由度。
虽然对于广泛的运动链存在逆运动学问题的解析解,但计算机建模和动画工具通常使用牛顿法来求解非线性运动学方程。
逆向运动学算法的其他应用包括交互操作、动画控制和碰撞避免。
逆运动学与3D动画
编辑逆运动学对于游戏编程和 3D 动画很重要,它用于将游戏角色物理地连接到世界,例如脚稳稳地落在地形顶部(有关计算机图形学中的反向运动学技术的全面调查,请参阅 )。
一个动画人物是用一个由关节连接的刚性段骨架建模的,称为运动链。 图形的运动学方程定义了图形的关节角度与其姿态或配置之间的关系。
正向运动学动画问题使用运动学方程来确定给定关节角度的姿势。 逆向运动学问题计算人物所需姿势的关节角度。
基于计算机的设计师、艺术家和动画师通常更容易通过移动部件或手臂和腿来定义组件或图形的空间配置,而不是直接操纵关节角度。 因此,逆向运动学在计算机辅助设计系统中被用于为装配体制作动画,并被基于计算机的艺术家和动画师用于定位人物和角色。
装配体被建模为由定义为配合或几何约束的接头连接的刚性链接。 一个元素的移动需要计算其他元素的关节角度以维持关节约束。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/217044/