
知觉控制理论
编辑感知控制理论 (PCT) 是一种基于负反馈控制回路特性的行为模型。 控制回路通过其输出对该变量的影响将感测变量维持在或接近参考值,如环境的物理特性所调节的那样。 在工程控制理论中,参考值是由系统外的用户设置的。 一个例子是恒温器。 在活的有机体中,受控感知变量的参考值是内生保持的。 生物稳态和反射是简单的低级示例。 控制数学原理的发现引入了一种对通过环境闭合的负反馈回路进行建模的方法(循环因果关系),这与将刺激建模为行为原因(线性因果关系)的行为主义和认知心理学理论有着根本的不同。 PCT 研究发表在实验心理学、神经科学、动物行为学、人类学、语言学、社会学、机器人学、发展心理学、组织心理学和管理学以及许多其他领域。 PCT 已应用于教育系统的设计和管理,并导致了一种称为水平法的心理治疗。
历史
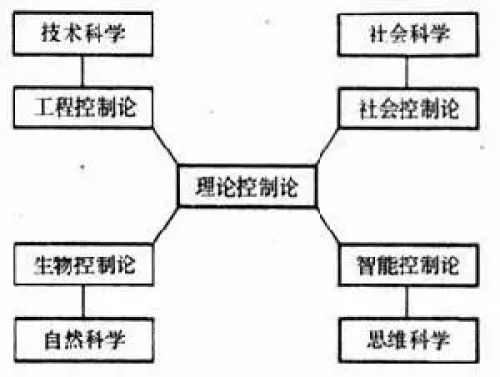
编辑PCT 源于 Claude Bernard 的生理学见解以及 20 世纪的控制系统工程和控制论。 经典的负反馈控制是在 1930 年代和 40 年代由工程师提出的,并在控制论领域的早期发展中由维纳、阿什比等人进一步发展。 从 1950 年代开始,William T. Powers 将工程控制系统的概念和方法应用到生物控制系统中,并发展了 PCT 的实验方法。
PCT 的一个关键见解是,受控变量不是系统的输出(行为动作),而是它的输入,即控制系统的输出可以感知和转换的某些环境状态的函数 影响。 由于这些感知和转换的输入可能表现为环境的有意识感知方面,鲍尔斯将受控变量标记为感知。 该理论后来被称为知觉控制理论或 PCT 而不是应用于心理学的控制理论,因为控制理论家经常断言或假设是系统的输出受到控制。 在 PCT 中,它是环境中某些变量状态的内部表示——日常语言中的一种感知——受到控制。 PCT 的基本原理首先由 Powers、Clark 和 MaCFArlAND 于 1960 年作为行为的一般反馈理论发表,并归功于控制论作者 Wiener 和 Ashby。 从那时起,它就在聚集在它周围的研究团体中得到了系统的发展。 最初,它因认知革命(后来被认知科学所取代)而黯然失色,但现在已广为人知。
Powers 和该领域的其他研究人员指出控制理论解决的心理学基础上的目的、因果关系和目的论问题。 从亚里士多德到威廉詹姆斯和约翰杜威,人们已经认识到行为是有目的的,而不仅仅是反应性的,但是如何解释这一点一直是个问题,因为意图的唯一证据是主观的。 正如鲍尔斯所指出的,追随冯特、桑代克、沃森和其他人的行为主义者拒绝将内省报告作为客观心理学的数据。 只有可观察到的行为才能被接纳为数据。 从这种立场可以得出这样的假设,即环境事件(刺激)会导致行为行为(反应)。 这一假设在认知心理学中仍然存在,它在刺激和反应之间插入认知地图和其他假定的信息处理,但在其他方面保留了从环境到行为的线性因果关系的假设。
鲍尔斯观察到心理学家拒绝目的或意图概念的另一个更具体的原因是,他们看不出目标(一种尚不存在的状态)如何导致导致目标的行为。
PCT 解决了这些关于目的论的哲学争论,因为它提供了一个有机体的功能模型,其中目的具有客观状态而无需求助于内省,并且因果关系是围绕反馈回路循环的。
例子
编辑一个简单的负反馈控制系统是汽车的巡航控制系统。 巡航控制系统有一个传感器,该传感器将速度感知为直接连接到车轮的驱动轴的旋转速率。 它还具有一个可由驾驶员调节的“目标”,用于指定特定速度。 通过一个设备(称为比较器)将检测到的速度与指定速度进行连续比较,该设备从存储的目标值中减去当前检测到的输入值。 差异(错误信号)决定了油门设置(加速器下压),使发动机输出。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/220258/