什么是伺服电机
编辑伺服电机是一个旋转致动器或线性致动器,其允许角速度或线的位置,速度和加速度的精确控制。它包括一个与传感器相连的合适的电动机,用于位置反馈。它还需要相对复杂的控制器,通常是专门设计用于伺服电机的专用模块。
尽管术语“ 伺服电动机”通常用于表示适用于闭环控制系统的电动机,但伺服电动机不是特定的电动机类别。
机制
编辑伺服电机是一种 闭环 伺服机构,它使用位置反馈来控制其运动和最终位置。控制输入是代表输出轴指令位置的信号(模拟或数字)。
电机与某种类型的位置编码器配对以提供位置和速度反馈。在最简单的情况下,仅测量位置。将测量的输出位置与命令位置(控制器的外部输入)进行比较。如果输出位置与要求的位置不同,则会生成一个错误信号,然后根据需要将电动机沿任一方向旋转,以将输出轴移至适当的位置。随着位置的接近,误差信号减小到零,并且电动机停止。

最简单的伺服电动机通过电位计和电动机的爆炸声控制使用仅位置感测;电动机始终以全速旋转(或停止)。这种类型的伺服电机并未广泛用于工业运动控制中,但它构成了用于无线电控制模型的简单廉价的伺服器的基础。
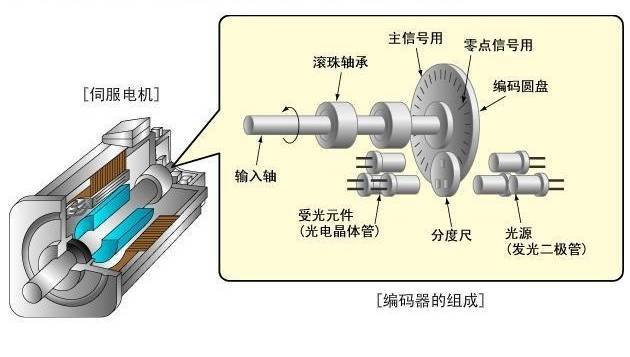
更复杂的伺服电动机使用光学旋转编码器测量输出轴的速度,并使用变速驱动器来控制电动机的速度。这两种增强功能通常与PID控制算法结合使用,可以使伺服电动机更快,更精确地到达其指令位置,而不会出现过冲现象。
伺服电动机与步进电动机
伺服电机通常用作步进电机的高性能替代产品。步进电机具有内置的输出步长,因此具有控制位置的固有能力。这通常使它们无需任何反馈编码器即可用作开环位置控制,因为它们的驱动信号指定了旋转运动的步数,但是为此,控制器需要“知道”步进电机的位置开机。因此,在xxx次加电时,控制器将必须启动步进电机并将其旋转到已知位置,例如直到启动终端限位开关为止。在打开喷墨打印机时可以观察到这一点; 控制器会将喷墨打印机的托架向左和向右移动,以建立最终位置。无论通电时的初始位置如何,伺服电动机都将立即旋转至控制器指示的任何角度。
步进电机缺乏反馈会限制其性能,因为步进电机只能驱动负载能力范围内的负载,否则负载下的失步可能会导致定位错误,并且系统可能必须重新启动或重新校准。伺服电机的编码器和控制器是额外的成本,但相对于基本电机的容量,它们可以优化整个系统的性能(在速度、功率和精度方面均达到最佳)。在大型系统中,强劲的电机占系统成本的比例越来越大,伺服电机具有优势。
近年来,闭环步进电机越来越流行。他们像伺服电机,但在他们的软件控制的一些差异,以获得平滑的运动。闭环步进电机的主要优点是其成本相对较低。也无需在闭环步进系统上调整PID控制器。
诸如激光切割机之类的许多应用可以提供两个范围,一个是步进电机的低价范围,另一个是使用伺服电机的高性能范围。
编码器
编辑开发了xxx批以同步器为编码器的伺服电机。在第二次世界大战期间,这些系统在雷达和高射炮的开发方面已经完成了许多工作。
简单的伺服电机可以使用电阻式电位器作为其位置编码器。这些仅在最简单和最便宜的水平上使用,并且与步进电机竞争激烈。它们在电位计轨道中遭受磨损和电噪声的困扰。尽管可以对其位置信号进行电微分以获得速度信号,但是可以利用这种速度信号的PID控制器通常需要更精确的编码器。
现代伺服电机使用旋转编码器,无论是xxx或增量。xxx编码器可以在上电时确定其位置,但更为复杂和昂贵。增量式编码器更简单,更便宜且工作速度更快。增量系统(如步进电机)通常将其固有的测量旋转间隔的能力与简单的零位传感器结合起来,以在启动时设置其位置。
有时使用带有单独的外部线性编码器的电机代替伺服电机。这些电动机+线性编码器系统避免了电动机和线性滑架之间传动系统的不准确性,但是由于它们不再是预先包装的出厂制造系统,因此其设计变得更加复杂。
马达
编辑电动机的类型对于伺服电动机并不重要,可以使用不同的类型。由于其简单性和低成本,最简单的是使用有刷永磁直流电动机。小型工业伺服电动机通常是电子换向的无刷电动机。对于大型工业伺服电动机,通常使用交流感应电动机,通常使用变频驱动器来控制其速度。为了在紧凑的包装中实现出色的性能,使用了具有永磁场的无刷交流电动机,这是大型的无刷直流电动机。
伺服电机的驱动模块是标准的工业组件。他们的设计是电力电子技术的一个分支,通常基于三相MOSFET或IGBT H桥。这些标准模块接受单个方向和脉冲计数(旋转距离)作为输入。它们还可能包括超温监控,超扭矩和失速检测功能。由于编码器的类型,齿轮减速比和整个系统的动态特性是特定于应用的,因此将整个控制器作为现成的模块生产会更加困难,因此通常将其作为主控制器的一部分来实现。
控制
编辑大多数现代伺服电机都是围绕同一制造商的专用控制器模块设计和提供的,也可以围绕微控制器开发控制器,以降低大批量应用的成本。
集成伺服电机
集成伺服电机的设计使其可以将电机,驱动器、编码器和相关的电子设备集成到一个包装中。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/107425/