运动副
编辑在经典力学中,运动学对是两个物理对象之间的联系,对它们的相对运动施加约束(运动学)。
描述
编辑运动学是经典力学的一个分支,它描述点、物体(物体)和物体系统(物体组)的运动,而不考虑运动的原因。 运动学作为一个研究领域通常被称为运动的几何学。
在刚体之间的联系问题上,鲁洛承认两种; 他称它们为较高和较低的(元素)对。 对于更高的对,两个元件在一点或沿一条线接触,如滚珠轴承或圆盘凸轮和从动件; 重合点的相对运动是不同的。 下对是那些可以看到区域接触的对,如销连接、十字头、球窝接头和其他一些; 元素的重合点的相对运动以及它们的链节的相对运动是相似的,并且将元素从一个链节交换到另一个链节不会像更高的一对那样改变零件的相对运动。
在运动学中,两个连接的物理对象形成一个运动对,称为“刚体”。 在机制、机械手或机器人的研究中,这两个对象通常被称为“链接”。
下对
编辑下对是理想的关节,它限制移动体中的表面与固定体中的对应表面之间的接触。 下对是其中两个构件之间发生表面或区域接触的一对,例如 螺母和螺钉,用于连接两个传动轴的万向节。
下关节病例:
- 旋转 R 关节或铰接关节需要移动体中的一条线与固定体中的一条线保持共线,并且移动体中垂直于该线的平面与类似的垂直平面保持接触 固定体内。 这对链接的相对运动施加了五个约束,因此具有一个自由度。
- 棱柱形 P 接头或滑块要求移动体中的一条线与固定体中的一条线保持共线,并且移动体中与该线平行的平面与移动体中的类似平行平面保持接触 固定的身体。 这对链接的相对运动施加了五个约束,因此具有一个自由度。
- 螺纹接头或螺旋 H 型接头需要在两个链接中切割螺纹,以便它们之间既有旋转运动也有滑动运动。 该关节具有一个自由度。
- 圆柱形 C 形接头要求移动体中的一条线与固定体中的一条线保持共线。 它是旋转关节和滑动关节的组合。 这个关节有两个自由度。
- 万向 U 型接头由两个相互交叉、相互正交的旋转接头组成,这些旋转接头连接刚性连杆,其轴线相互倾斜。
- 球形 S 形接头或球窝接头要求移动体中的一个点在固定体中保持静止。 该关节具有三个自由度,对应于围绕正交轴的旋转。
- 平面关节要求移动体中的平面与固定体中的平面保持接触。 该关节具有三个自由度。 动平面可以沿固定平面进行二维滑动,可以绕固定平面的法线轴旋转。
- 平行四边形 Pa 关节由四个连杆组成,四个连杆通过平行四边形角上的四个旋转关节连接在一起。
高对
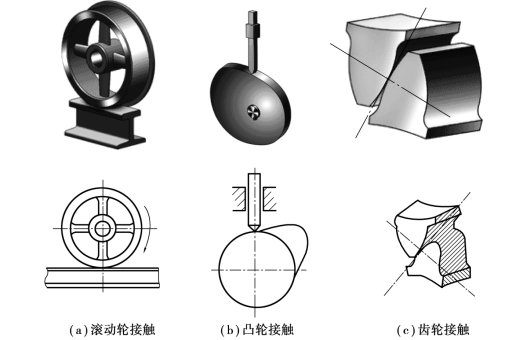
编辑通常,较高的对是一种约束,需要移动体中的曲线或曲面与固定体中的曲线或曲面保持接触。 例如,凸轮与其从动件之间的接触是称为凸轮接头的高级副。 类似地,形成两个齿轮啮合齿的渐开线曲线之间的接触是凸轮接头,就像在表面上滚动的轮子一样。 它具有点或线接触。

包装对/高对
编辑包裹/更高对是一种约束,包括皮带、链条和此类其他设备。 皮带驱动滑轮就是这对的一个例子。在这种类型中,它与更高的对(具有点或线接触)非常相似,但具有多点接触......
联合记法
编辑上下文
机械装置、操纵器或机器人通常由通过关节连接在一起的连杆组成。 串行机械手,如 SCARA 机器人,通过单链节和关节将移动平台连接到底座。
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/214401/