
什么是云机器人
编辑云机器人是一个领域的机器人,试图调用云技术,例如云计算、云存储,以及其他互联网技术为中心的融合基础设施的机器人技术的好处和共享服务。当连接到云时,机器人可以从云中现代数据中心强大的计算,存储和通信资源中受益,后者可以处理和共享来自各种机器人或代理(其他机器、智能对象、人类等)的信息。 人类还可以通过网络将任务委托给机器人。云计算技术使机器人系统具有强大的功能,同时通过云技术降低了成本。因此,可以构建轻量、低成本更智能的机器人,使它们在云中具有智能的“大脑”。“大脑”由数据中心、知识库、任务计划者、深度学习、信息处理、环境模型、通信支持等组成。
组件
编辑机器人云可能至少具有六个重要组成部分:
- 提供图像,地图和对象数据的全球库,通常具有几何和机械特性、专家系统、知识库(即语义网、数据中心);
- 基于样本的统计建模和运动计划、任务计划、多机器人协作、系统调度和协调的按需大规模并行计算;
- 机器人共享成果、轨迹、动态控制策略和机器人学习支持;
- 人工共享用于编程,实验和硬件构造的“开源”代码,数据和设计;
- 按需人工指导和协助进行评估,学习和错误恢复;
- 通过各种方式(语义知识库,Apple Siri类服务等)增强了人机交互。
应用分类
编辑-
自主移动机器人
编辑 - GOOGLE的自动驾驶汽车是云机器人。这些汽车使用网络访问Google庞大的地图数据库以及卫星和环境模型(例如Streetview),并将其与GPS,摄像头和3D传感器的流数据结合起来,以监控自己在厘米内的位置以及过去和当前的交通状况避免碰撞。每辆汽车都可以了解有关环境,道路,驾驶或状况的信息,然后将信息发送到Google云,在此可用于改善其他汽车的性能。
-
云医疗机器人
编辑 - 医疗云(也称为医疗保健集群)由各种服务组成,例如疾病档案、电子病历、患者健康管理系统、实践服务、分析服务、诊所解决方案、专家系统等。机器人可以连接到云为患者提供临床服务,并为医生提供帮助(例如,联合手术机器人)。此外,它还通过在医生和护理人员之间共享有关临床治疗的信息来提供协作服务。
-
辅助机器人
编辑 - 一个家用机器人可以用于医疗保健和生命监测老年人。该系统收集用户的健康状况,并与云专家系统或医生交换信息,以便利老年人的生活,特别是对于那些患有慢性疾病的人。例如,机器人能够提供支持以防止老人跌倒,并提供紧急健康支持,例如心脏病,血液病。紧急情况下,老人的护理人员还可以通过网络从机器人获得通知。
-
工业机器人
编辑 - 正如德国政府的《工业4.0计划》所强调的那样,“工业正处于第四次工业革命的门槛。在互联网的推动下,现实世界和虚拟世界越来越近地形成了物联网。未来的工业生产其特点是在高度灵活(大批量)生产的条件下产品的个性化很强,客户和业务合作伙伴在业务和增值过程中的广泛整合,以及生产和高质量服务之间的联系导致了所谓的混合产品。” 在制造中,此类基于云的机器人系统可以学习处理诸如穿线或电缆穿线或从专业知识库中对齐垫片等任务。一组机器人可以共享一些协作任务的信息。更重要的是,消费者可以使用在线订购系统直接向制造机器人下达定制的产品订单。另一个潜在的范例是购物送货机器人系统。下订单后,仓库机器人将物品分派到自动驾驶汽车或自动无人机将其交付给接收者。
机器人研究
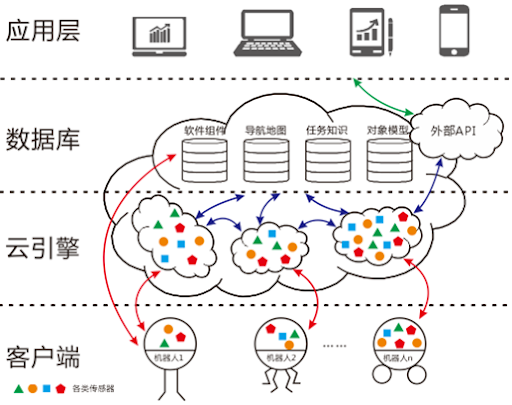
编辑机器人地球由欧盟第七框架计划资助、用于研究、技术开发项目、专门用于探索云机器人技术领域。RoboEarth的目标是使机器人系统能够从其他机器人的经验中受益,从而为机器认知和行为的快速发展铺平道路,并最终实现更微妙和复杂的人机交互。RoboEarth提供了Cloud Robotics基础架构。RoboEarth的万维网样式数据库以机器可读的格式存储人类和机器人产生的知识。RoboEarth知识库中存储的数据包括软件组件,导航地图(例如,对象位置、世界模型),任务知识(例如,动作配方、操作策略)和对象识别模型(例如,图像、对象模型)。
Rapyuta是由ETHZ的机器人研究人员开发的基于RoboEarth Engine的开源云机器人框架。在该框架内,连接到Rapyuta的每个机器人都可以拥有一个安全的计算环境(矩形框),从而使他们能够将繁重的计算转移到云中。此外,计算环境彼此紧密互连,并与RoboEarth知识库建立了高带宽连接。
KnowRob是RoboEarth的扩展项目。它是一个知识处理系统,将知识表示和推理方法与获取知识和在物理系统中扎根知识的技术相结合,可以用作集成来自不同来源的信息的通用语义框架。
机器人脑是一个大型计算系统,可从可公开获得的Internet资源,计算机模拟和现实生活中的机器人试验中学习。它将所有机器人技术积累到一个全面且相互联系的知识库中。应用程序包括机器人研究,家用机器人和自动驾驶汽车的原型制作。目标与项目名称一样直接,即创建一个集中的,始终在线的大脑,供机器人使用。该项目由斯坦福大学和康奈尔大学主导。该项目得到了美国国家科学基金会,海军研究办公室,陆军研究办公室、谷歌、微软、高通、阿尔弗雷德·P·斯隆基金会和国家机器人计划的支持,其目标是推动机器人技术的发展,以帮助制造美国在世界经济中更具竞争力。
MyRobots是一项用于将机器人和智能设备连接到Internet的服务。它可以被视为机器人和智能对象的社交网络(即,机器人的Facebook)。通过社交、协作和共享、机器人也可以通过共享传感器信息,从而洞悉其当前状态,从而从这些交互中受益。
COALAS 由法国INTERREG IVA –英国欧洲跨境合作计划资助。该项目旨在通过社会和技术创新以及用户的社会和心理诚信为残疾人开发新技术。目的是通过使用人形机器人,智能轮椅等与云连接的家庭服务机器人,在云中创建带有医疗保健集群的认知环境辅助生活系统。
ROS(机器人操作系统)提供了一个生态系统来支持云机器人。ROS是用于机器人软件开发的灵活且分布式的框架。它是工具,库和约定的集合,旨在简化跨各种机器人平台创建复杂且健壮的机器人行为的任务。ROS的库是纯Java实现,称为rosjava,它允许为机器人开发ANDroid应用程序。由于Android拥有蓬勃发展的市场和十亿用户,因此在Cloud Robotics领域将具有重要意义。
DAVinci Project是一个提出的软件框架,旨在探索将某些机器人算法并行化为HADOop中的 Map / Reduce任务的可能性。该项目旨在构建一个云计算环境,该环境能够提供由商用硬件构建的计算集群,该软件集群将一套机器人算法作为SaaS公开,并在整个机器人生态系统中合作共享数据。该倡议未公开。
C2RO(C2RO云机器人)是一个平台,可处理实时应用程序,例如云中的避免碰撞和对象识别。以前,高延迟时间阻止了这些应用程序在云中进行处理,因此需要系统上的计算硬件(例如图形处理单元或GPU)。C2RO在IEEE PIMRC17上发表了同行评审的论文,表明其平台可以使机器人(甚至是那些具有有限的计算硬件(例如RaSPberry Pi)的机器人)从云中获得自主导航和其他AI服务。C2RO最终声称是2017年9月在RoboBusiness上展示基于云的 SLAM(同时定位和地图绘制)的第一个平台。
Noos是一种云机器人技术服务,向与其连接的机器人提供集中化的智能。该服务于2017年12月启用。通过使用Noos-API,开发人员可以访问用于计算机视觉,深度学习和SLAM的服务。Noos由 Ortelio Ltd开发和维护。
Rocos是一个集中式云机器人平台,可为开发人员提供工具和基础架构,以大规模构建、测试、部署、操作和自动化机器人队伍。该平台成立于2017年10月,于2019年1月上线。
云机器人技术的局限性
编辑尽管机器人可以从云计算的各种优势中受益,但是云并不是所有机器人技术的解决方案。
- 控制机器人的运动很大程度上依赖于(实时)传感器和控制器的反馈,可能不会从云中获得太多好处。
- 涉及实时执行的任务需要板上处理。
- 由于高延迟响应或网络故障,基于云的应用程序可能变慢或不可用。如果机器人过多地依赖云,则网络中的故障可能会使它“毫无脑子”。
挑战
编辑云机器人技术的研究和开发存在以下潜在问题和挑战:
- 可扩展的 并行化 – 网格计算,并行化方案随自动化基础架构的规模而扩展。
- 有效的负载平衡:平衡本地和云计算之间的操作。
- 知识库和表示形式
- 云中自动化的集体学习
- 基础架构/平台或软件即服务
- 物联网的机器人
- 集成和协作式容错控制
- 大数据:通过大型,可访问的网络收集和/或分发的数据可以帮助您做出分类问题或揭示模式。
- 无线通信,与云的连接
- 机器人云的系统架构
- 开源,开放访问基础架构
- 分担工作量
- 标准和协议
内容由匿名用户提供,本内容不代表vibaike.com立场,内容投诉举报请联系vibaike.com客服。如若转载,请注明出处:https://vibaike.com/106596/